09/15/02 Built The First Forced
Articulation System
Last night Jason showed me his Lego Crawler and I thought it was way cool.
I have a bunch of Legos from my earlier years, so today I started working on
mine. I don't have all the gears, gear boxes and motors Jason has, so I'll
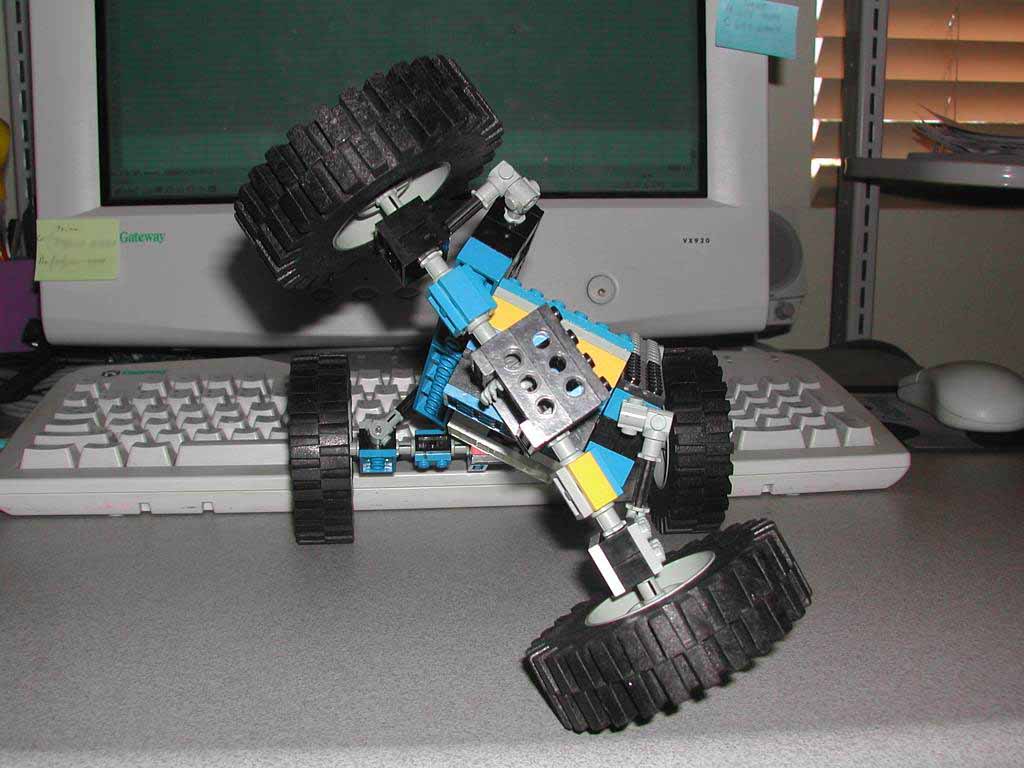
have to work on that. For now, I began working on a "Forced
Articulation" system. What that does is when one tire is forced up by
an obstacle, it forces the other tire, on the same side of the vehicle, in the opposite
direction. With a solid axle system, this links all four tires
together. For example, when the front right tire is forced up, it forces
the front left down, the rear right down, and the rear left up. It's tough
to explain, so check out the pictures:
The object in the second picture that the tire is on is my first gear reduction
system. So far I can only get 405:1 in the gear box and another 3:1 in
the axles for a grand total of 1215:1. Jason had 5832:1 and the speed
seemed perfect, so I know I have some work to do there.
I also have a video of the articulation system, check it out:
09/15/02
0.5MB
8 seconds
09/19/02 Ordered parts on ebay
Today I won two auctions for "Lego Crawler" parts. First I got
an "Exploration Mars" kit for $31.50. This will give me more
gears, axle couplers and most importantly the 24:1 diff housings. Next, I
bought a 9v motor for $13. This should be all I need to get the power to
the wheels and see how the forced articulation system works.
09/21/02 Redesigned the body
While I'm waiting for my parts to arrive from the ebay purchases, I decided to
get to work building the main body of the crawler. What I had before was
just a dummy block so I could get the FAS functioning. When my motor
arrives, I'll be looking to get this crawler in motion, so I built the gear
reduction system and made space for the 9v motor. I'm not sure where the
battery will sit, but I'll just rubber band it on somewhere for now. I
built the body with the engine and battery located at the front of the
model. I think this weight differential will help the crawler climb.
The gear reduction occurs for the entire length of the body with (5) 3:1
reductions. Then the power drops down to a lower point for the drive shafts.
This is so the front drive shaft can run under the rest of the gear
reduction. This works out nicely because the rear drive shaft is
short. The rear does most of the heavy work and I believe it will be
stronger this way. The body came out 3 lugs longer than it was originally,
and the same width. Currently 19 long and 6 wide. The FAS sits on the
outside of the body and is a total of 4 lugs wide. I also changed the
upper part of the articulation arms. I'm using universal joints instead of
the dual "Angle Connector #1" I used before. The u-joints take
up less space and have a cleaner look to them. The last thing that I added
was flex limiters. This way, when the FAS flexes WAY out, it will
stop before the tires bind on the articulation arms.
09/24/02 Ordered another motor
No parts yet. Today I learned that the motor I bought on ebay (Lego P/N
5114) has a low torque rating. I've also heard that it's running RPM is
either 4,000 or 1420. Either way, I'm geared WAY too low now. I
found another Lego motor (P/N 5225) that has a much better torque rating and is
already geared down to 375 RPM. Couple that with (2) 3:1 reductions and
the final 24:1 worm gearbox and I'll spin a tire right around 30 seconds.
Should be perfect. I found out that the "Hover-Sub with Motor"
kit comes with the 5225 motor and costs less than $20. I found one at a
website in Florida and submitted my order. I'm supposed to hear back from
the guy who has it for sale to arrange payment. I guess the website is
kind of like an ebay, but without the auction part.
09/25/02 We have motion
The FedEx guy delivered the first motor that I bought on ebay. I did a
test with the motor and it spins at 3850 rpm with a 9v battery attached.
Not quite 4,000, but close. With the 3:1 gears in the axles and the (6)
3:1 reductions in the main body, that gives me a total of 2187:1 to the
wheels. The wheel takes 34 seconds to rotate.
I couldn't wait for my other parts to arrive
so I made a few changes to get this sucker rolling under it's own power. I
had the change the overall gearing to 1093:1 by changing an 8 tooth gear for a
16 tooth gear (on the motor). That's because I was 1 8 tooth gear short of
getting 4WD functioning. Then I setup a few phone books and the video
camera.
09/25/02
7.7MB
1 minute : 28 seconds
Now all I need is my "Expedition
Mars" kit to arrive and I'll change out the axles for worm gear boxes, the
u-joint underneath for an axle coupler, my homemade axle extensions for more
axle couplers, etc.
09/27/02 Got the Expedition Mars kit
USPS delivered my "Exploration Mars" kit this afternoon. I
immediately went to work changing the crawler. I changed out the axles,
axle couplers, and I changes the body a bit. I moved the articulation arms
down quite a bit since the new worm gear boxes raised the vehicle so much.
I also made the articulation arms shorter so the axles can flex more without
binding on the links. I then changed the gearing inside the crawler.
I removed (1) 3:1 reduction since the axles will now be 24:1 instead of
3:1. Next I changed the gear on the motor. I was using a 16 tooth
because I ran out of 8 tooth gears. The 16 tooth gear didn't align well
with the 24 tooth. The 8 tooth lines up perfectly. The last change I
made was bump stops. I had tried a bump stop system that was hidden from
view, but it wasn't strong enough to keep the tires from binding on the
body. The new body stops are on the outside, very visible and very
effective.
Click the pictures for an 800x600 version in
a new window:
09/29/02 More "field" testing
Shot some video today on the dining room table. This one features the
"Crawler CAM". Those familiar with my other hobby (Jeeps) might
recognize this technology. It's a 12VDC "lipstick" camera.
I rubber banded it to a couple Lego pieces and took the crawler for a spin on
some of Natalie's rubber stamps. The crawler did so well it nearly climbed
the wall at the end of the table. You have to watch the video to see the
surprise ending though.
09/29/02
12.2MB
2 minutes : 22 seconds
10/07/02 Final changes before the
competition
I received my 2nd motor that I ordered. This one is the geared down motor
and supposedly only spins at 375. I didn't test it, but it's A LOT slower
than the other motor and that's good enough for me. I was able to remove a
bunch of gear sets so now I'm down to a 2:1, and (2) 3:1 reductions in the body
totaling 18:1. Then the 24:1 at the axles making a grand total of
432:1. This spins the tire at 1 revolution in 80 seconds. Now that I
think about it, the rules indicate the tire must rotate in less than 60 seconds,
so I guess I'll be making more changes after all. Also, I guess the motor
is spinning at 324 RPM. Anyway, here's today's pictures:
The first pic shows max articulation with the
bump stops in place. The 2nd picture shows max with the bump stops
removed. I need to run the bump stops to keep the tires from rubbing the articulation
links under max compression. The 5th pic shows the power switch.
It's the small 1 by 2 gray thing above the yellow gear box. The 6th &
7th pics show the inside battery box (right), motor (center) and a couple of the
body mounted gear reductions (left). The last pic shows the under side of
the crawler.
10/08/02 Final, final changes
I had to change the gear ratio to comply with the rules. I removed the 2:1
reduction, so the overall reduction is 216:1. This spins a tire at 1
revolution in 40 seconds. That's good enough.
06/06/03 Black gear boxes
Just for kicks, I ordered a couple black worm gear boxes from someone on
BrickLink. Cost me all of $4.96 including shipping for two worm gear boxes
and two grey worm gears. Now I'm 99.9% color coordinated. I still
have one blue brick that's mostly hidden.